Learning MPC for Prosthetics
Written on October 10th, 2021 by Geoffrey Clark One of the most critical challenges for assistive devices is finding the Goldilocks control signals. Too much or too little force at the wrong time quickly builds up to cause long-term musculoskeletal degeneration, such as osteoarthritis. Users of modern prosthetics are at severe risk of secondary musculoskeletal conditions due to their prosthetics being even slightly misaligned. Therefore, it is of utmost importance to produce safe and ergonomic control policies that take into account the potential biomechanical load the control policy places on the user.
One of the most critical challenges for assistive devices is finding the Goldilocks control signals. Too much or too little force at the wrong time quickly builds up to cause long-term musculoskeletal degeneration, such as osteoarthritis. Users of modern prosthetics are at severe risk of secondary musculoskeletal conditions due to their prosthetics being even slightly misaligned. Therefore, it is of utmost importance to produce safe and ergonomic control policies that take into account the potential biomechanical load the control policy places on the user.
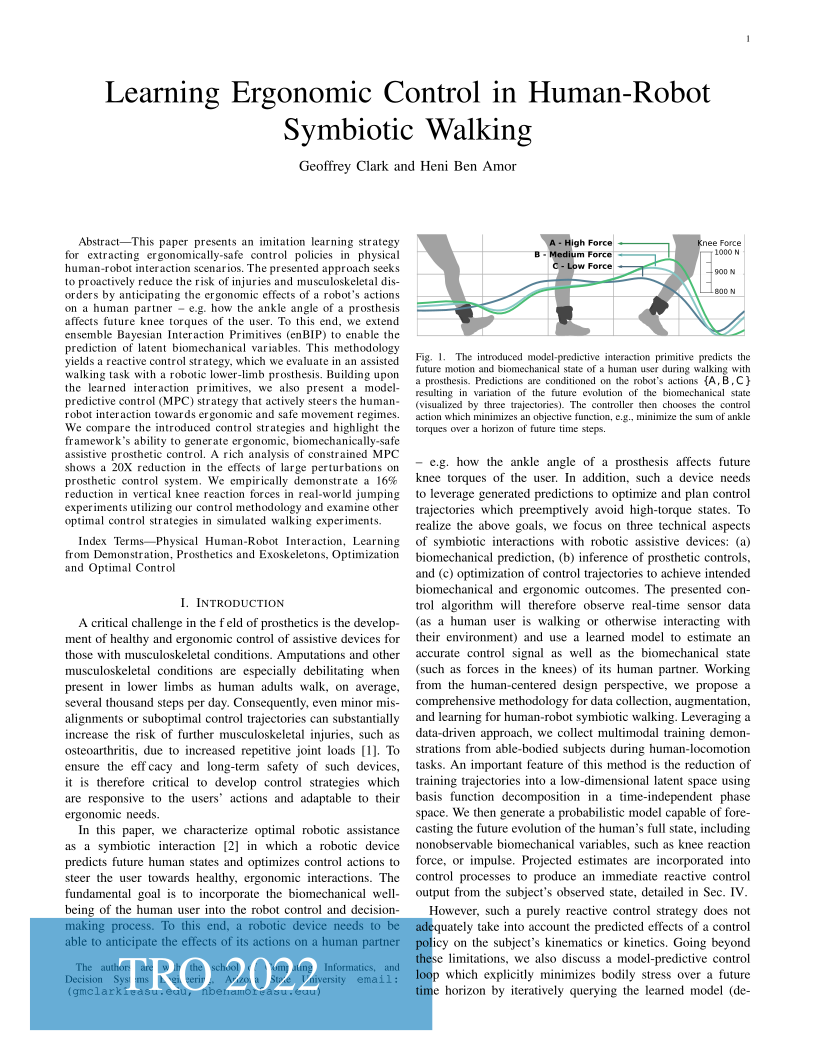
By first utilizing predictive models to anticipate the users’ actions, we can select the best control action for long-term health and ergonomics. I constructed a novel model predictive control formulation that optimizes the control policy in real-time utilizing a probabilistic formulation. We show a significant reduction in joint impacts in both normal walking and vertical jumping using our controller and a 20X reduction in the effects of perturbations. Notably, this work combines novel ML models with classical optimal control methods for prediction and human-centered control.
Further Information
For further information, please consult the peer-reviewed conference and journal papers below, as well as our github repository:
 |
 |